You are not authenticated, login.
|
|
m8ta
You are not authenticated, login. |
|
| {1555} | |||||
Recently I've been underwhelmed by the performance of adaptive optics (AO) for imaging head-fixed cranial-window mice. There hasn't been much of an improvement, despite significant optimization effort. This begs the question: where are AO microscopes used? When the purpose of a paper is to explain and qualify an novel AO approach, the improvement is always good, >> 2x. Yet, in the one paper (first below) when the purpose was neuroscience, not optics, the results are less inspiring. Are the results from the optics papers cherry-picked? Thalamus provides layer 4 of primary visual cortex with orientation- and direction-tuned inputs Wenzhi Sun, Zhongchao Tan, Brett D Mensh & Na Ji 2016 https://www.nature.com/articles/nn.4196
Direct wavefront sensing for high-resolution in vivo imaging in scattering tissue Kai Wang, Wenzhi Sun, Christopher T. Richie, Brandon K. Harvey, Eric Betzig & Na Ji, 2015 https://www.nature.com/articles/ncomms8276
Multiplexed aberration measurement for deep tissue imaging in vivo Chen Wang, Rui Liu, Daniel E Milkie, Wenzhi Sun, Zhongchao Tan, Aaron Kerlin, Tsai-Wen Chen, Douglas S Kim & Na Ji 2014 https://www.nature.com/articles/nmeth.3068
| |||||
| {1487} |
ref: -0
tags: adaptive optics sensorless retina fluorescence imaging optimization zernicke polynomials
date: 11-15-2019 02:51 gmt
revision:0
[head]
|
||||
PMID-26819812 Wavefront sensorless adaptive optics fluorescence biomicroscope for in vivo retinal imaging in mice
| |||||
| {99} | |||||
PMID-15928412[0] Naive coadaptive Control May 2005. see notes ____References____ | |||||
| {1198} | |||||
PMID-22049097[0] Mechanically adaptive intracortical implants improve the proximity of neuronal cell bodies.
____References____
| |||||
| {334} | |||||
PMID-12052948[0] Direct Cortical Control of 3D Neuroprosthetic Devices
____References____ | |||||
| {585} | |||||
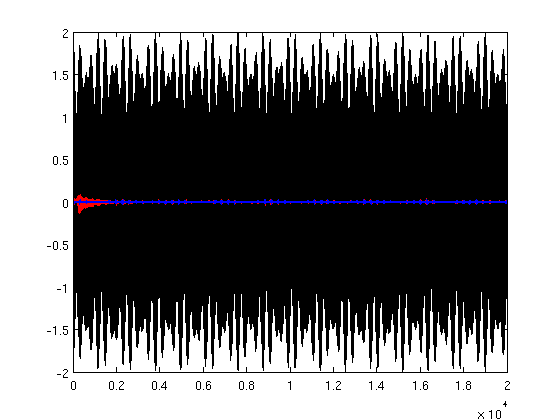
LMS-based adaptive decorrelator, xn is the noise, xs is the signal, len is the length of the signal, delay is the delay beyond which the autocorrelation function of the signal is zero but the acf of the noise is non-zero. The filter is very simple, and should be easy to implement in a DSP. function [y,e,h] = lms_test(xn, xs, len, delay) h = zeros(len, 1); x = xn + xs; for k = 1:length(x)-len-delay y(k) = x(k+delay:k+len-1+delay) * h ; e(k) = x(k) - y(k); h = h + 0.0004 * e(k) * x(k+delay:k+len-1+delay)'; endIt works well if the noise source is predictable & stable: (black = sinusoidal noise, red = output, green = error in output)
Now, what if the amplitude of the corrupting sinusoid changes (e.g. due to varying electrode properties during movement), and the changes per cycle are larger than the amplitude of the signal? The signal will be swamped! The solution to this is to adapt the decorrelating filter slowly, by adding an extra (multiplicative, nonlinear) gain term to track the error in terms of the absolute values of the signals (another nonlinearity). So, if the input signal is on average larger than the output, the gain goes up and vice-versa. See the code. function [y,e,h,g] = lms_test(xn, xs, len, delay) h = zeros(len, 1); x = xn + xs; gain = 1; e = zeros(size(x)); e2 = zeros(size(x)); for k = 1:length(x)-len-delay y(k) = x(k+delay:k+len-1+delay) * h; e(k) = (x(k) - y(k)); h = h + 0.0002 * e(k) * x(k+delay:k+len-1+delay)'; % slow adaptation. y2(k) = y(k) * gain; e2(k) = abs(x(k)) - abs(y2(k)); gain = gain + 1 * e2(k) ; gain = abs(gain); if (gain > 3) gain = 3; end g(k) = gain; end If, like me, you are interested in only the abstract features of the signal, and not an accurate reconstruction of the waveform, then the gain signal (g above) reflects the signal in question (once the predictive filter has adapted). In my experiments with a length 16 filter delayed 16 samples, extracting the gain signal and filtering out out-of-band information yielded about +45db improvement in SNR. This was with a signal 1/100th the size of the disturbing amplitude-modulated noise. This is about twice as good as the human ear/auditory system in my tests.
It doesn't look like much, but it is just perfect for EMG signals corrupted by time-varying 60hz noise. | |||||
| {900} | |||||
PMID-12929922 Training in cortical control of neuroprosthetic devices improves signal extraction from small neuronal ensembles.
| |||||
| {140} | |||||
PMID-15649663 Composite adaptive control with locally weighted statistical learning.
| |||||